
Interaction Situation
Robot and user are not engaged in interaction. The user occupied with a solo activity that does not involve or require attention from the robot. In this situation, the robot should be positioned in a reachable distance to the user, but not in the center of her attention. The robot fades into the background, but is still present to the user in case she needs it. In this mode, the sensors of the robot that are actively recording a reduced to those that are essential to detect a trigger to turn the robot on again.
Solution
Let the robot express that:
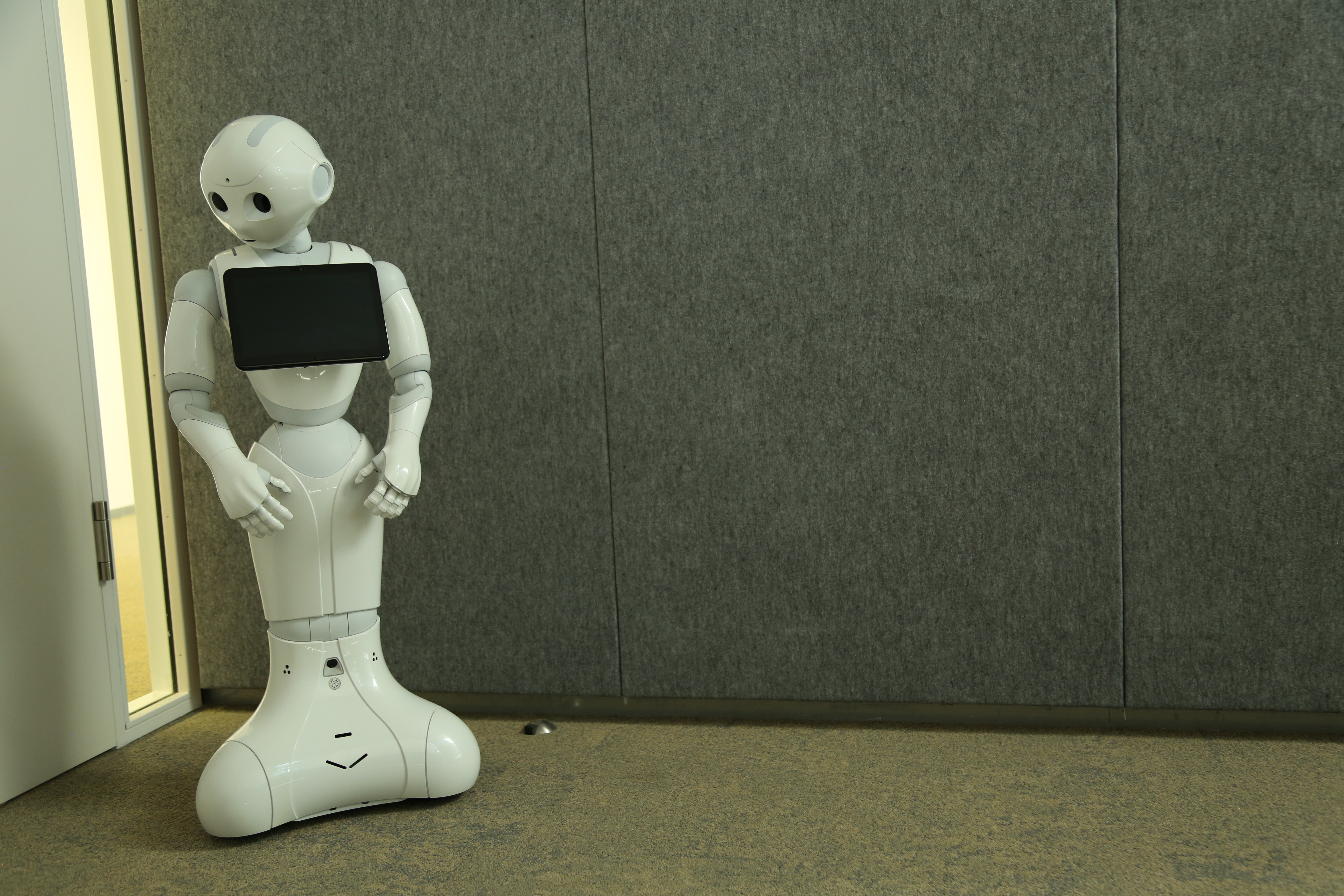
The passive, but available state of the robot can be expressed by positioning the robot close to the wall, so that it is out of the way of the user and less present to her.
If possible, make it visible which sensors are active in this state, especially to communicate that the robot is not (secretly) surveilling the user. This can, for example, be achieved by half covering the eyes/ camera of the robot.
Related patterns:
Needed by: Inactive, Becoming active, Becoming inactive
Works well together with: Inside Turn

Examples

Rationale
In social interaction, availability is closely connected to being physically present – within sight or earshot. Passive availability is expressed by being physically present without showing the other person in the room any attention (i.e. there is no eye contact or other communication). Babies, for example, react positively to the presence of the mother in the room, even if she is occupied with other activities. Her presence has a reassuring effect.
Robots can be made passively available by positioning them in interaction distance of the user. In the movie “Robot and Frank”, the robot retreats to the corner of the room when its user Frank is engaged in conversation with other people, where it waits until Frank requests interaction with it.
By doing so, the robot does not only withdraw itself from the human conversation, it also grants Frank some privacy. In this connection, it is important to always make it visible when sensors of the robot are still actively recording, even though the robot appears to withdrawn from the interaction.
References and further readings:
- Fronemann, N., Pollmann, K., & Loh, W.-H. (2021). Should my robot know what’s best for me? – Human-Robot Interaction between User Experience and Ethical Design. AI & Society. Special Issue: Critical Robotics.