
Interaction Situation
Robot and user are not engaged in a particular interaction. In this situation, it is important that – despite the temporary inactivity of the robot – the user is still made aware that it is ready for interaction and could initiate an action any second. Thus, on the one hand, the user is not startled by the upcoming action of the robot. On the other hand, the user knows that she can expect the robot to react as soon as she initiates an interaction herself.
Solution
Let the robot express that:
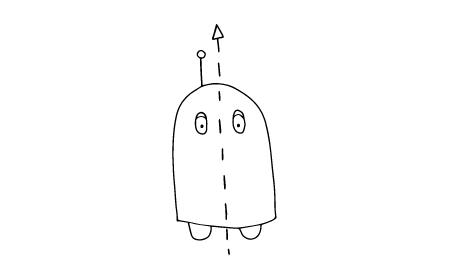
Readiness for action can be expressed through an open, upright posture. The head is facing forwards, the torso is straightened up.
This impression can be emphasized by not covering the eyes / camera to indicate that robot is actively recording the user and surroundings – a requirement for it to start acting on its own.
Related patterns:
Needed by: Active, Becoming active, Becoming inactive
Opposed patterns: Inside Turn, Passively Available

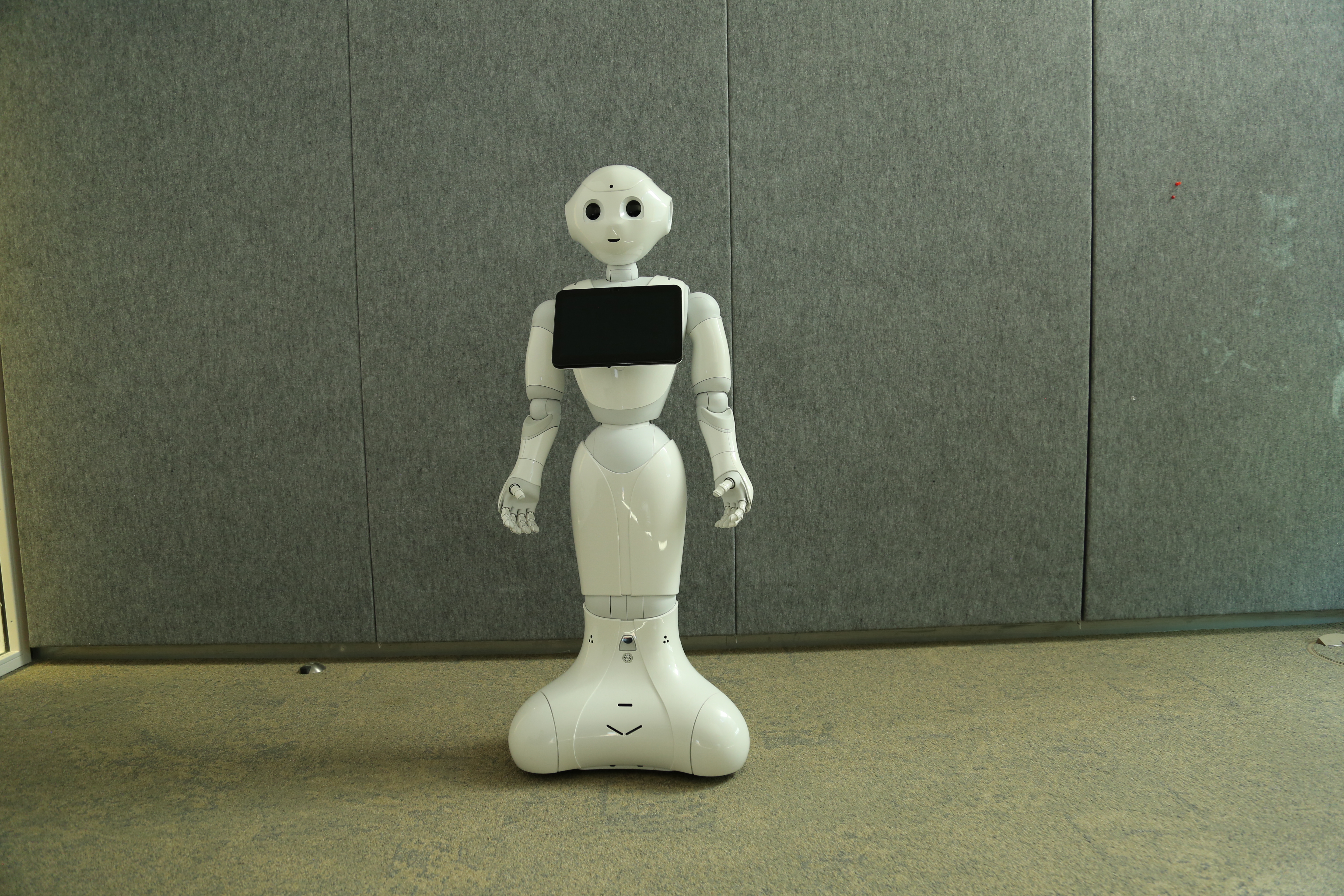
Examples

Rationale
People that are ready for (inter-)actions usually take an upright position, maintaining body tension as an expression for their capability to react right away, if possible. Such postures are, for example, taken by flight assistants or other service staff when waiting for someone to come up to them with a request. In robotic design, many robots have an upright, rigid body per default. With more flexible robot forms, an upright position can be made more explicit: To give an example. the robot Baymax inflates itself, in order to indicate readiness.