
Interaction Situation
Robot and user are engaged in interaction. For this interaction, something in the environment becomes important. Joint attention of the robot and user on this object or piece of information is essential to make the interaction successful. Therefore, the robot needs to make sure that the user pays attention to it.
Solution
Let the robot express that:
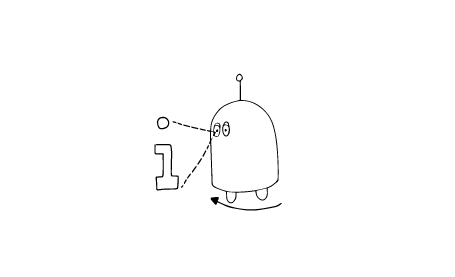
The robot can evoke joint attention through its own behavior. The user’s attention can by guided by directing the robot’s gaze at the object or information. Another way is to shift the robot’s body posture so that it faces the information. Alternatively, the robot can make a defined pointing gesture towards the information.
As shown in social human interaction, the user will follow the attention shift of the robot and direct her own attention at the information.
Related patterns:
Needed by: Showing

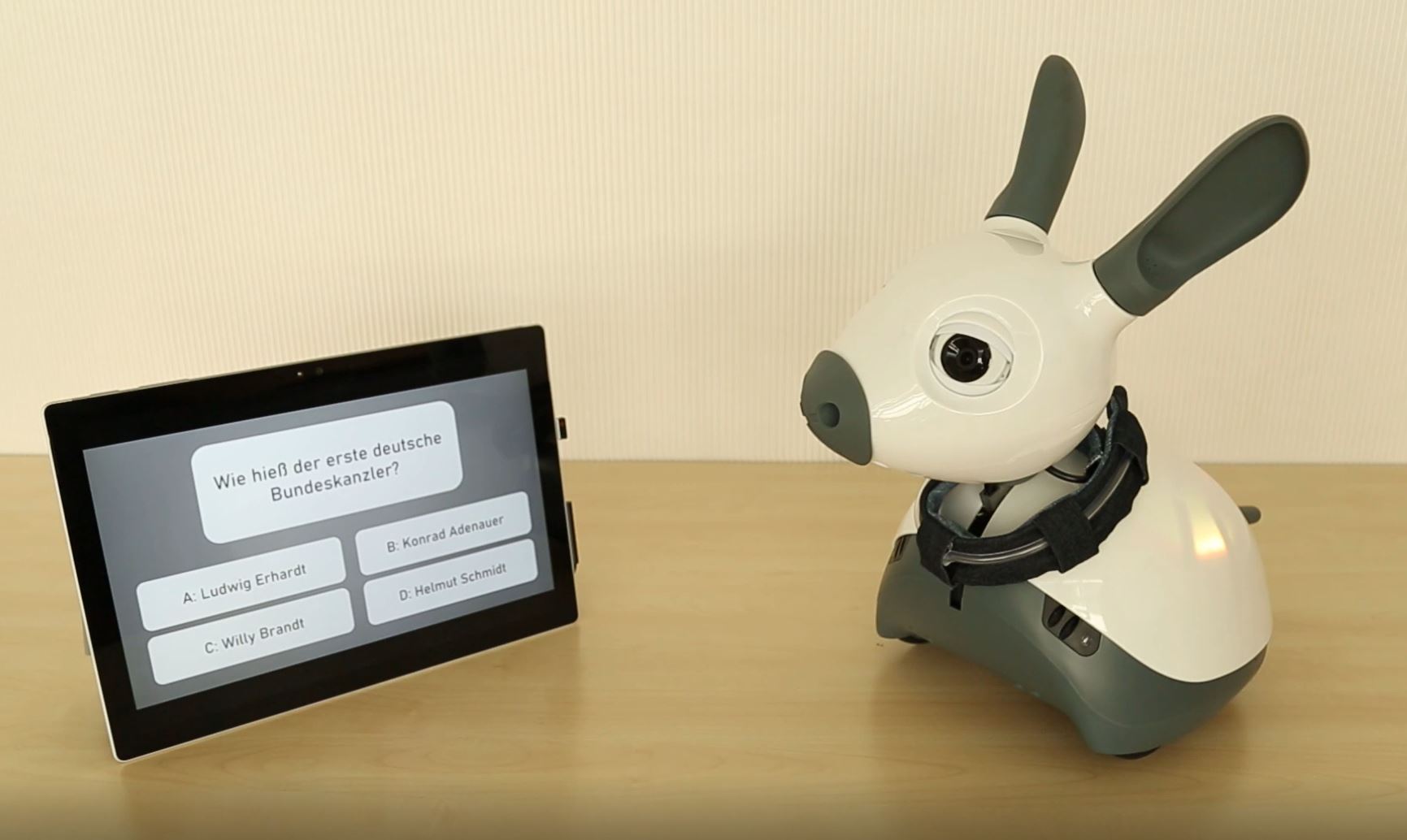
Examples

Rationale
Whether on the screen, in virtual reality or in real life – moving objects attract attention. The observer’s attention follows the movement and is thus directed to both, the moving object and its target. Robot’s can use movement to guide the user’s attention.
This impression can further be emphasized by making use of the phenomenon of joint attention: In human-human interaction, we tend to follow the gaze of the other person, when it moves away from our face. The same principles is used by animals such as cats to communicate with their owner. Studies have shown that robots with eyes can achieve similar joint attention effects, when directing their gaze at relevant information during a joint robot-user task.
Another way to explicitly guide another person’s attention is to point an arm, hand or finger at the object of interest. Such pointing gestures are very familiar to us from daily interactions with other humans, but also often used by robots with arms in different science fiction movies.
References and further reading:
- Mutlu, B. (2009). Designing gaze behavior for humanlike robots (Unpublished doctoral dissertation), Pittsburgh, PA, USA.
- Mizoguchi, H., Takagi, K., Hatamura, Y., Nakao, M., & Sato, T. (1997, September). Behavioral expression by an expressive mobile robot-expressing vividness, mental distance, and attention. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications. IROS’97(Vol. 1, pp. 306–311). IEEE. https://doi.org/1109/IROS.1997.649070