
Interaction Situation
During the interaction, their sometimes occur situation during which the robot remains rather still. To decrease the potential feeling of eeriness that can be caused by such situations and support its impression as an animate interaction partner, the robot can display subtle, idle movements.
Solution
Let the robot express that:
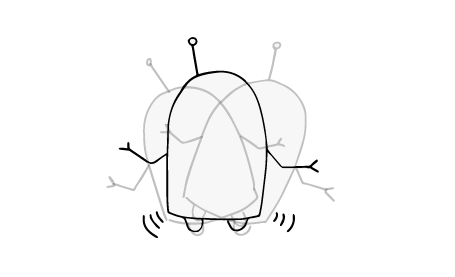
Let the robot make small movements with single joints (e.g. arms, head or facial parts) or with the whole body. These movements can be idle/ random, but should – if possible – be meaningful and match the interaction context. Depending on the robot’s form and capabilities, suitable idle movements can be the imitation of breathing through sinusoidal body motion, posture sway from left to right, shifting the robot’s gaze away from the user from time to time or adding random blinks to the robot’s eyes. If a robot uses face tracking, the impression of liveliness is automatically supported by the robot’s head shifts towards the user.
In general, movements should not be to abrupt and fast, in order to not attract to much attention during the interaction.
Related patterns:
Extends: Active, Explaining

Examples
Rationale
Creating certain idle movements to express vividness is often used as a stylistic device for character animation in video games. This idea is inspired by human behavior: The human body never remains completely still, it is always somehow in motion. Principles of character animation like breathing, blinking, gaze and posture shifts have been successfully applied to robot behavior design and shown to be effective in creating an illusion of vividness. Depending on the robot, idle movements were realized as movements on the floor or movements of different body parts such as head, arms or torso.
For robots with faces, small movements can also be realized with different facial parts. For animated eyes, blinking is often used as a sign of vividness, as can be seen in the movies Baymax and Wall-E or the autonomous life mode of Softbank’s Pepper robot.
References and further reading:
- Egges, A., Molet, T., & Magnenat-Thalmann, N. (2004, October). Personalised real-time idle motion synthesis. In 12th Pacific Conference on Computer Graphics and Applications, 2004. PG 2004. Proceedings.(pp. 121–130). IEEE. https://doi.org/10.1109/PCCGA.2004.1348342
- Ribeiro, T., & Paiva, A. (2012, March). The illusion of robotic life: principles and practices of animation for robots. In Proceedings of the seventh annual ACM/IEEE international conference on Human-Robot Interaction(pp. 383–390). https://doi.org/10.1145/2157689.2157814
- Cuijpers, R. H., & Knops, M. A. (2015, October). Motions of robots matter! the social effects of idle and meaningful motions. In International Conference on Social Robotics(pp. 174–183). Springer, Cham. https://doi.org/10.1007/978-3-319-25554-5_18
- Löffler, D., Schmidt, N., & Tscharn, R. (2018, February). Multimodal expression of artificial emotion in social robots using color, motion and sound. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction(pp. 334–343). https://doi.org/10.1145/3171221.3171261
- Mizoguchi, H., Takagi, K., Hatamura, Y., Nakao, M., & Sato, T. (1997, September). Behavioral expression by an expressive mobile robot-expressing vividness, mental distance, and attention. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications. IROS’97 (Vol. 1, pp. 306–311). IEEE. https://doi.org/10.1109/IROS.1997.649070